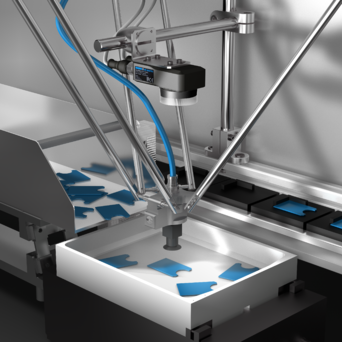
Localisation et saisie
Les capteurs de vision sont adaptés pour détecter la position d’objets plats situés sur une plaque vibrante rétro-éclairée. Tout d’abord, le capteur de vision CS-60 est programmé pour un objet. Le CS-60 détermine et transmet les coordonnées X/Y ainsi que la position et l’orientation de l’objet le plus adapté via PROFINET, Ethernet TCP/IP ou RS 232 à un robot qui saisit et dépose l’objet. Si le CS-60 ne trouve plus aucune pièce dans l’espace de travail, de nouveaux objets sont amenés via le système d’alimentation.
