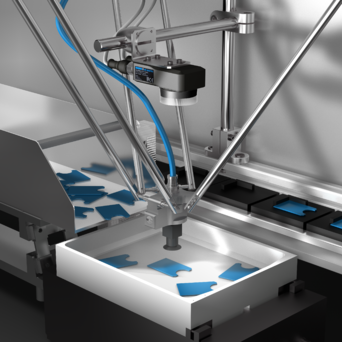
Locating and gripping
Vision sensors are suitable for position detection of flat objects located on a vibrating plate lit from behind. The first step is to teach in the CS-60 Vision Sensor to an object. The CS-60 determines and transmits the X/Y coordinates and the orientation of the most suitable object to a robot via PROFINET, Ethernet TCP/IP or RS 232. The robot grips the object and sets it down. If the CS-60 does not find any more parts in the operating range that can be located, new objects are fed in by the conveyor system.
