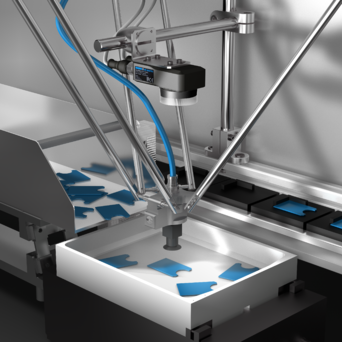
定位和抓取
视觉传感器适合用于确定处在背后照明振动板上的扁平物体的位置。首先教导视觉传感器 CS-60 认识某个物体。CS-60 会通过测定物体的 X/Y 坐标和转动位置来寻找到最合适的物体,通过 PROFINET、以太网 TCP/IP 或者 RS 232 将这些数据传输给机器人,由机器人负责抓取和放下该物体。如果 CS-60 在工作区中没有找到可以定位的零件,就会通过输送系统供应新的物体。

| Tel: | +49 7181 98 79-710 |
| customer-service@di-soric.com | |
| Mo-Do: | 08:00–17:00 Uhr |
| Fr: | 08:00–16:00 Uhr |
| Tel: | +49 7181 98 79-700 |
| service@di-soric.com | |
| Mo-Do: | 08:00–16:00 Uhr |
| Fr: | 08:00–14:00 Uhr |